Модуль управления виртуальными средами
При управлении роботами в симуляторе Gazebo через фреймворк ROS2 возникает необходимость конфигурировать не только робота-манипулятора, но и саму сцену. Однако стандартный подход, основанный на конфигурационных файлах Gazebo, зачастую оказывается избыточным и недостаточно гибким для динамических сценариев, к которым относится обучение с подкреплением.
env_manager — это пакет, предназначенный для конфигурирования сцен в симуляторе Gazebo, предоставляющий более удобный и гибкий подход к созданию и настройке симуляционных сред.
Возможности пакета
С последнего обновления модуль был полностью переработан. Если ранее его функции ограничивались указанием объектов, находящихся в среде, для работы в ROS2, то теперь он предоставляет инструменты для:
- полного конфигурирования сцены,
- настройки объектов наблюдения для ROS2.
Конфигурация осуществляется с использованием датаклассов или YAML-файлов, что соответствует декларативному подходу описания сцены. Это делает процесс настройки интуитивно понятным и легко масштабируемым. Пример файла описания сцены, а также файл с конфигурацией по умолчанию доступны здесь.
Возможности конфигурации
Модуль поддерживает добавление различных типов объектов в сцену, включая:
- Модель
- Меш
- Бокс
- Цилиндр
- Сферу
Различие между "моделью" и "мешем" заключается в том, находится ли объект в библиотеке rbs_assets_library (подробнее о ней см. соответствующий раздел). Дополнительно поддерживается рандомизация объектов, позволяющая случайным образом изменять их цвет и положение в сцене.
Помимо объектов, с помощью пакета можно настраивать:
- Источники света
- Сенсоры
- Роботов
- Рабочие поверхности
Каждый тип объекта обладает как параметрами размещения, так и параметрами рандомизации. Для камер предусмотрены настройки публикации данных:
- изображения глубины
- цветного изображения
- облаков точек.
Параметры рандомизации могут включать в себя положение, ориентацию в заданных пользователем пределах, а также. Для рабочей поверхности также включается возможность рандомизации текстуры, а для робота имеется возможность рандомизировать его положения, в том числе конфигурацию и расположение базы робота.
Архитектура и спецификации
Основная структура модуля включает обертки для добавления объектов в сцену. Полная спецификация доступных параметров и взаимосвязей между классами представлена в папке конфигураций. Для каждой категории объектов используются отдельные датаклассы, что упрощает организацию и модификацию параметров.
Диаграмма классов конфигурации сцены представлена ниже:
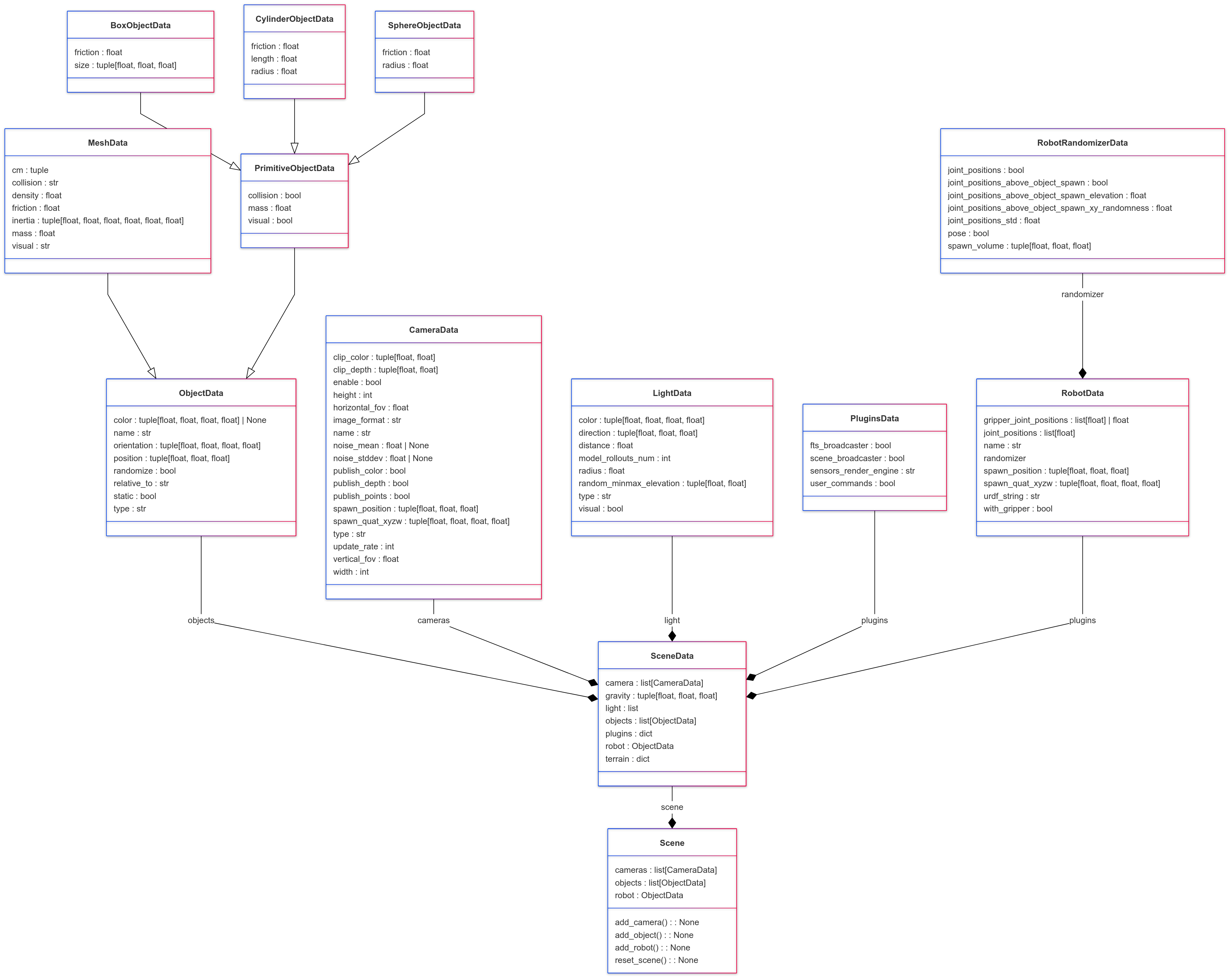
Диаграмма классов конфигурации сцены
Примеры
Ниже представлены различные сцены, созданные с использованием возможностей env_manager:
| Сценарий 1 | Сценарий 2 | Сценарий 3 |
|---|---|---|
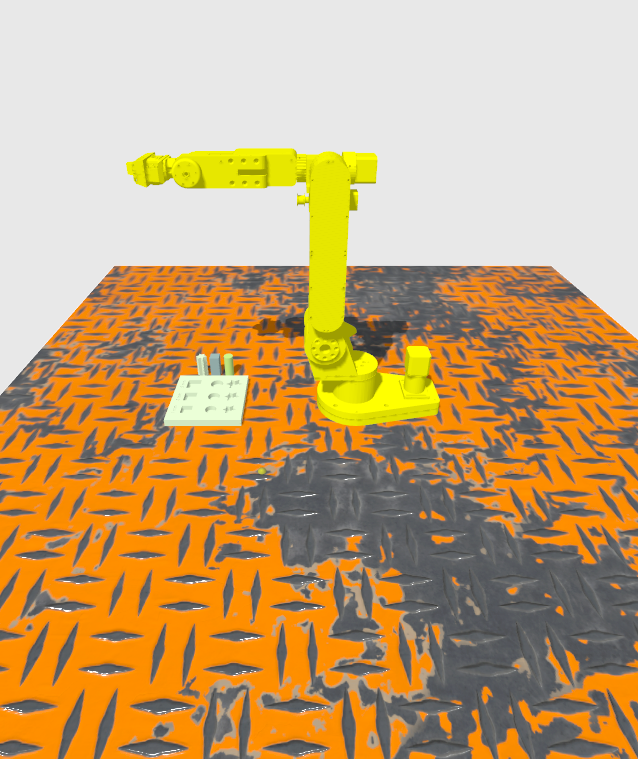 | 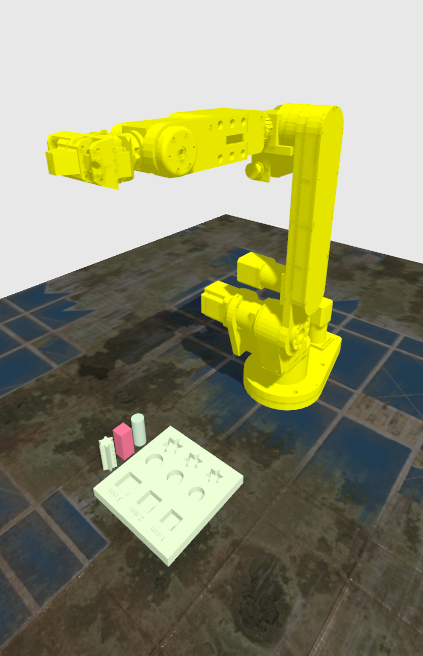 | 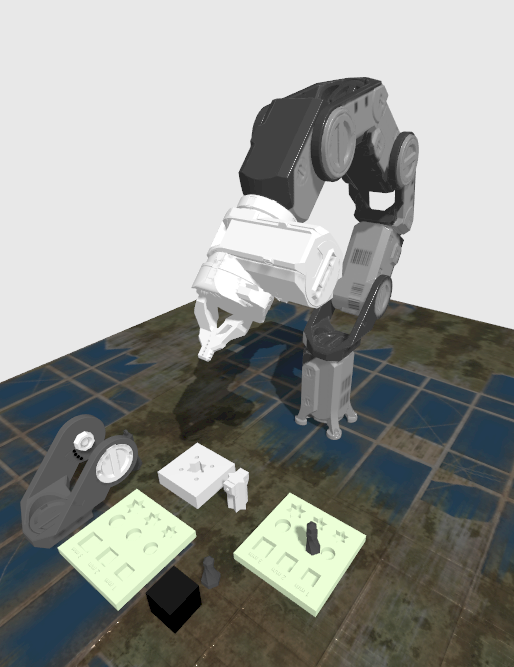 |