Хранение и транспортировка
Храниться объекты АПС должны так, чтобы на них не попадала не летела, скажем, пыль и стружка. Транспортироваться все объекты должны удобным стандартным образом, чтобы не решать каждый раз эту задачу. Этому служит инфраструктура (транспортно-складская). Вот пример варианта минималистичной инфраструктуры:
Здесь объекты можно разделить на малые и крупные. Малые - помещающиеся целиком в стандартную складскую ячейку (ячейки в принципе могут иметь разный размер, быть сборными). Крупные - не помещающиеся ни в какую складскую ячейку.
Для каждого малого изделия может изготавливаться (часто - как одно целое с ним) специальная оправка предназначенная для его хранения и транспортировки. Например, путем трехмерной печати с низким процентом заполнения. Эта оправка имеет несколько интерфейсов:
- Транспортный (стандартный, удобный захват для транспортного манипулятора)
- Специальный (вставка индивидуальная для каждого объекта, обеспечивающая его бережный захват и позиционирование). По сути - это переходник между транспортным интерфейсом и объектом.
- Контрольный (место где удобно, скажем просвечивать лучом чтобы определить на месте ли объект, или соответствует ли он проекту).
- Складской(которым оправка вставляется в стандартную складскую ячейку, которые могут быть как отдельными, так и собираемыми в массив).
- Рабочий (которым оправка позиционируется для обработки и фиксируется)
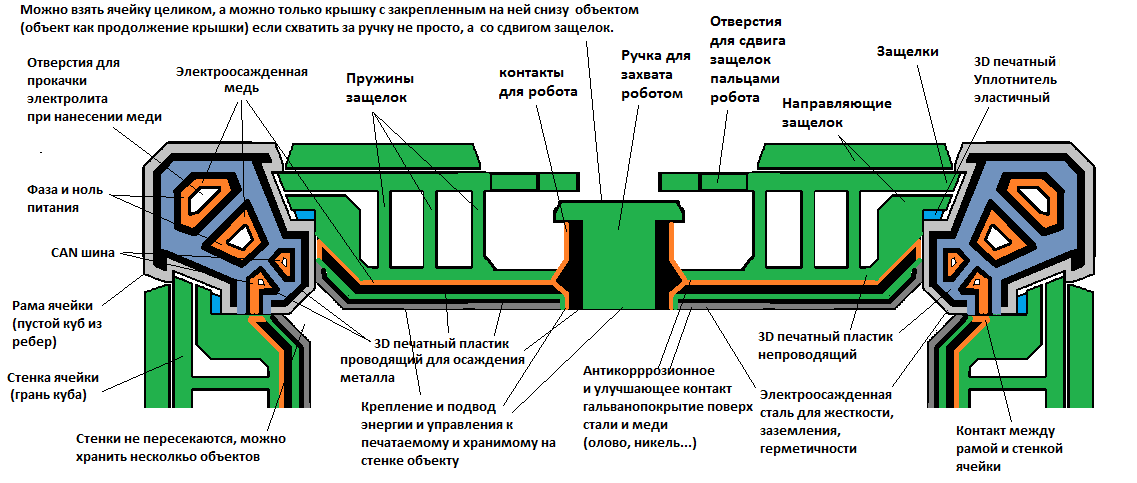
- Питания и управления (через который объект обменивается энергией и сигналами со складской ячейкой или транспортным манипулятором)
Контрольный, складской и рабочий интерфейсы могут совпадать. Тогда подвижный манипулятор берет оправку за транспортный интерфейс, вынимает из складской ячейки и помещает в такую же ячейку у себя на борту. Приехав на место обработки он за транспортный интерфейс вынимает оправку и вставляет в обрабатывающее устройство с таким же интерфейсом как и на складе и на борту. Соответственно, обрабатывающие устройства имеют по несколько интерфейсов для объектов-инструментов и объектов-изделий. Для малых изделий, которые надо обработать с разных сторон предусматривается плановая перестановка их на другие оправки.
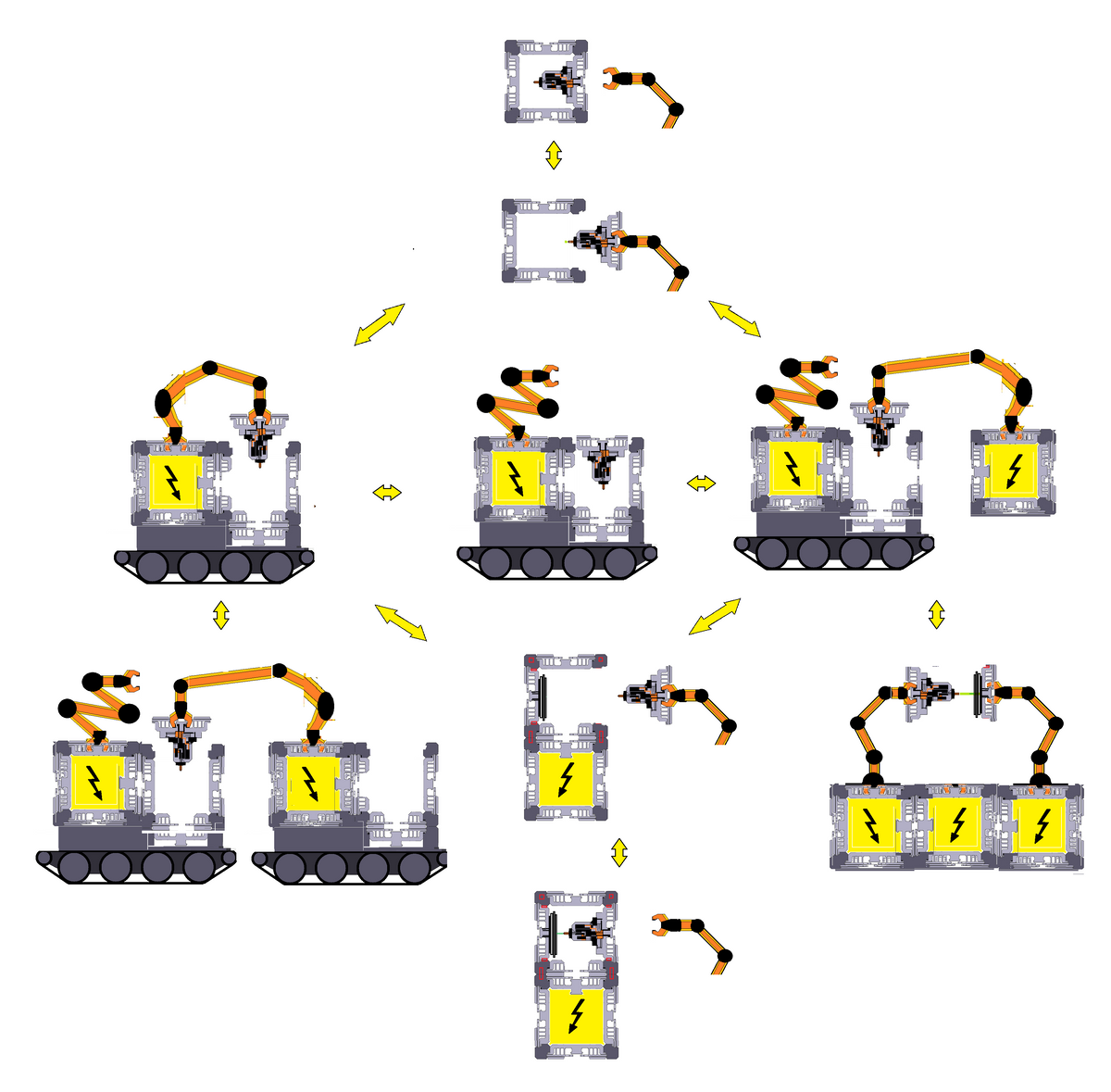
Можно предусмотреть соединение и разъединение ячеек. При некоторых способах захвата манипулятор тащит всю сборку, а при некоторых - отсоединяет от нее отдельный элемент.
Крупные изделия (не влезающие в стандартные ячейки) могут быть следующих форматов:
- Подвижные роботы-манипуляторы(после сборки перемещаются своим ходом, складирования и обработки не требуют). Перемещениями мобильных манипуляторов (ММ) заведуют их контроллеры и планировщик. Мощность подвижного манипулятора должна позволять буксировать (хотя бы группой) любой объект который может встретиться в работе АПС. Сами же такие крупные объекты должны быть специально сделаны удоботранспортируемыми - иметь колесики, удобные места захвата и т.п. При выходе из строя подвижного манипулятора его должен уметь утащить на утилизацию аналогичный манипулятор.
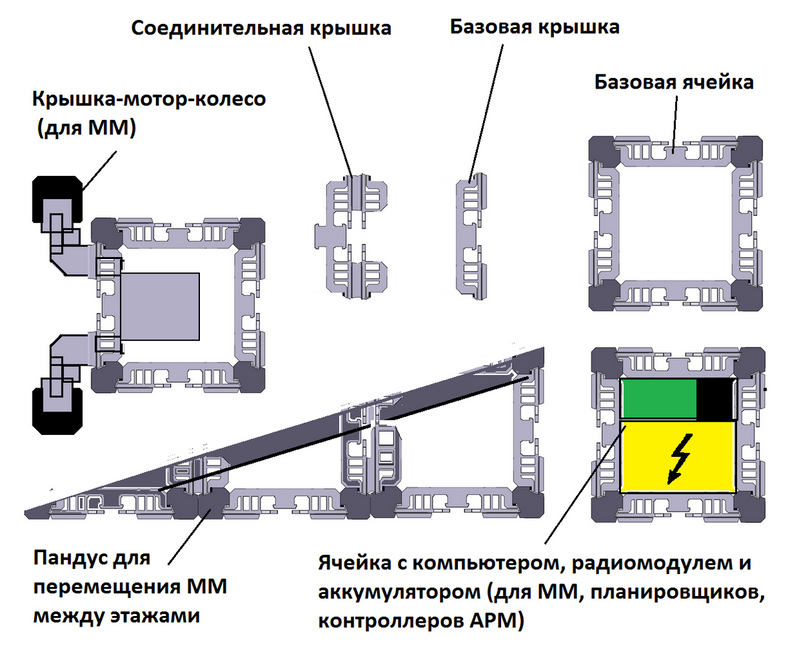
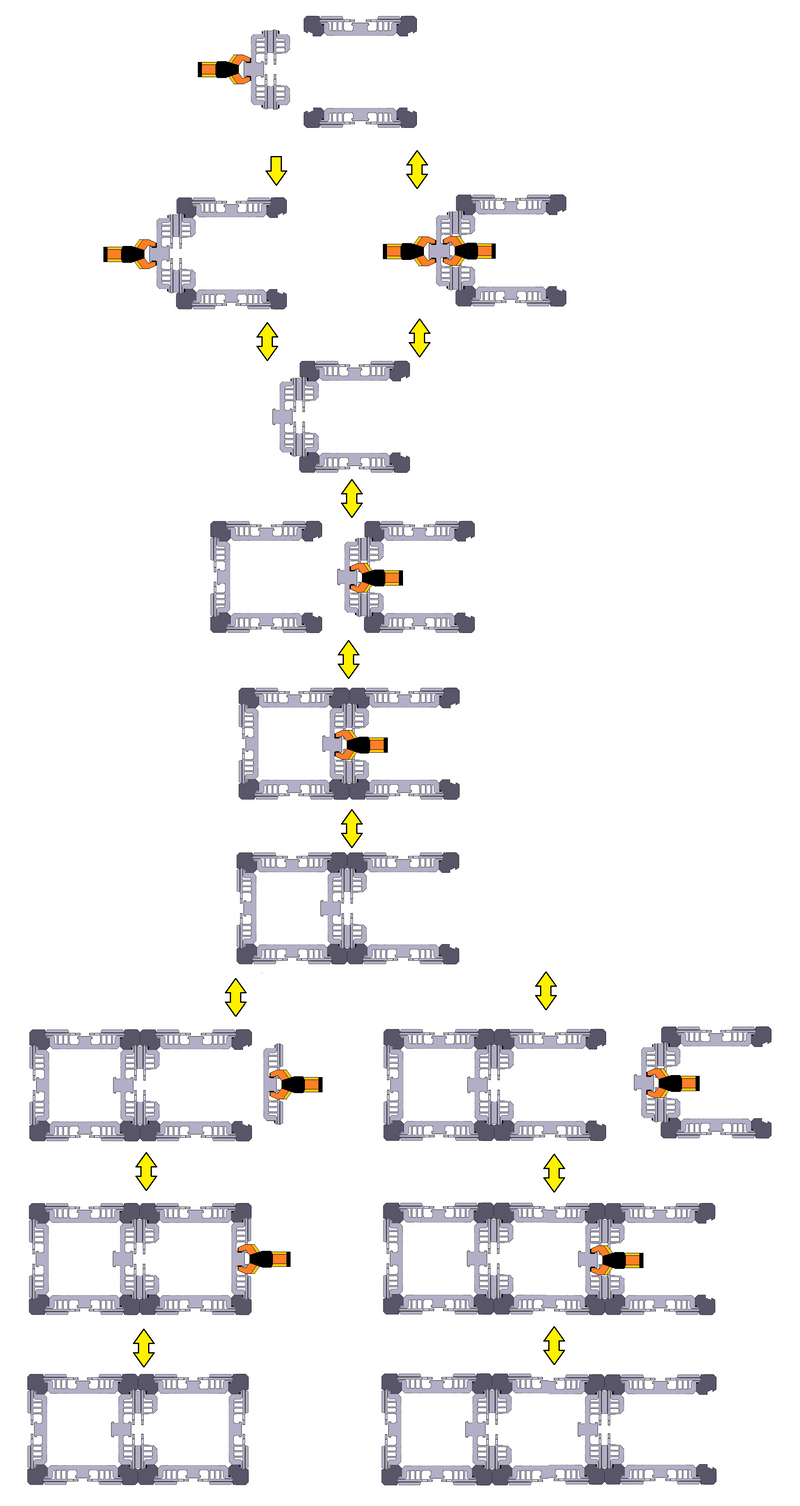
- Сама стандартная ячейка. Помимо интерфейса для вставки изделий она может иметь собственные транспортные интерфейсы и интерфейсы для стыковки с другими ячейками. Эти коробки могут играть и вспомогательные роли стен, пола, потолка, в общем, инфраструктуры АПС. Так занимаемое ими место будет приносить пользу, ограждая техпроцессы и изделия от внешних воздействий. Можно представить вариант такой ячейки как условно Лего-кубик с отверстием с одного из боков. Двойная стена из таких кубиков обеспечивает доступ к обоим слоям изделий. Можно делать кубик сразу под два изделия с перегородкой и двумя входами. Оптимальная форма сооружения по-видимому напоминает древовидный лабиринт с проходами несколько более ширины робота манипулятора. С помощью специальных балок можно перекрывать потолком коридоры лабиринта и возводить новые этажи. Для перемещения между этажами мобильных манипуляторов можно опять же по аналогии с Лего предусмотреть наклонные элементы Возможно сочетать эту систему с кратными и дробными размерами коробок. Можно, конечно, изготавливать и чисто несущие колонны и блоки без складских пустот. Так может получиться растущий робомуравейник. Конечно, вес коробки должен позволять подвижному манипулятору ее без проблем перемещать и устанавливать в нужные места. В формате этих коробок могут быть выполнены стандартные сосуды для жидкостей, газов и сыпучих материалов.
- Обрабатывающие устройства (станки). Их размер и масса теоретически не ограничены, поэтому перемещать их можно только по частям и собирать на месте использования. Они должны содержать по-видимому, избыточное количество мест и способов разъединения на случай заклинивания. Они могут быть самоходными чтобы можно было их все же удалить в случае выхода из строя. Они могут быть размещены на таком месте и на такой высоте чтобы можно было использовать силу тяжести для их демонтажа и удаления. - Компьютеры-планировщики. Они могут быть большими, но нет особенных препятствий для того чтобы они собирались из небольших процессорных и дисковых модулей.
- Длинные предметы (прутки, профили, полосы, балки) не могут быть спозиционированы с одной стороны. но на них по длине может быть установлено много транспортных оправок, сбоку могут подъехать манипуляторы и за эти оправки синхронно забрать изделие и установить куда нужно. Для их хранения нужны специальные оправки предусматривающие как от трех до пяти открытых сторон.
- Большие плоские предметы (листы, плиты), с которыми нельзя работать предыдущим способом, могут быть захвачены с двух сторон и покоиться на оправках-островках с пятью открытыми сторонами. Если предмет слишком тяжел или велик для этого, он хранится на высоких параллельных стенах или колоннах, пространство между которыми заполняется манипуляторами, затем они приподнимают изделие и перемещают изделие синхронно.
- Большие объемные предметы, слишком тяжелые для предыдущего способа лучше вообще не перемещать, а если это необходимо, строить для этого соответствующее транспортное оборудование.
Таким образом, практически любые изделия, как малые, так и крупные могут храниться и перемещаться вышеописанным или другим автоматическим и унифицированным образом, не требующим разработки специальных программ для каждого конкретного случая.